一则由HaptX触感手套引发的思维幻想症
此前,我们曾报道触觉反馈解决方案上HaptX的VR手套,其最出色的气泡触控方案足够优秀,能让手掌和手指感受到轻微的压力、形状甚至温度等,从而在VR中呈现更为逼真的沉浸式操控体验。

如今,这一操控特性正在被延伸,如今已经被应用到远程操控的触觉机器人系统中,其特点是可以实现远程操控机器人手臂,而HaptX手套的加入还可以通过力反馈与亚毫米追踪传感器将机器人手臂的触觉传递给人类。
这件事情要起于,1950年美国通用电气公司的工程师Ralph Mosheri引领拟人机器操控系统(CAMS)项目。之后到了1965年,基于此想法又诞生一套Hardiman动力外骨骼系统。Hardiman是陆军海军的一个联合项目,其旨在创建提升人体控制和力量的动力外骨骼系统。

简而言之,在当时年代人们更关注的不是人工智能,而是“人体增强”系统。这其中的挑战就在于人们操控者如何通过力反馈感受Hardiman触感,这也包括力量。
如果不能实现,这样的机器人似乎也就没有用处。因此,操控者必须能够准确外部系统的压力和等一系列变化。
不过最终由于液压机械系统在稳定性和电源等方面的问题尚未得到完美解决,因此该项目始终处于原型设计阶段,最终被搁浅。
然而,Mosher工程师的研究依然被得以延续。如今随着智能机器人、5G技术、人工智能等技术的进步,所谓关于远程遥控触觉机器人则应运而生。
该方案的远程端采用了一个多轴机械臂,拥有灵活拟人手指设计。而另一端采用了人手去控制,同时结合HaptX触觉手套,这样就人类就可以远程感受机械臂的触感了。
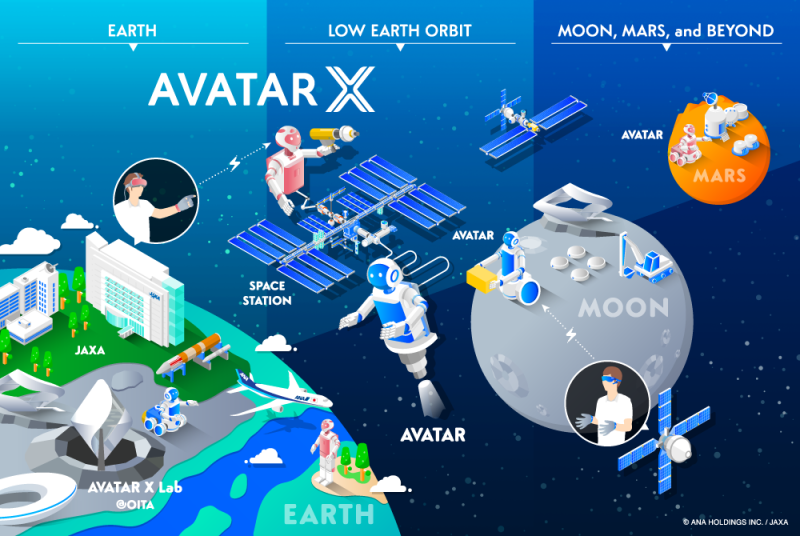
据悉,这套方案来自于Avatar X机器人计划。Avatar X计划是由ANA(全日空)和JAXA(日本航天探测局)联合成立的,这是一项关于太空探索以及太空教育、太空建筑、太空生活等前沿科技的合作项目。
根据Avatar X官网介绍显示,该项目的最终目标是地球上的人可以远程操控月球表面的机器人,同时地球的医生也能对低空轨道中空间站上的航天员进行医疗诊断,这也是日本流行漫画《兄弟》中的场景,最终让其变为现实。

现在让我们回到这套方案中,该方案结合了Shadow公司的机器人手,其具备20个度,指尖高灵敏触摸传感器。其特点是:基本上可以模拟人手的各种动作;体积大小和成年人手掌接近;共拥有129个传感器,可每个关节的相对;支持高带宽接口可连接其它传感器;平台代码,方便自定义。

同时,结合SynTouch公司的BioTac传感器就可以检测超灵敏的指尖拥有超灵敏触感,实现类人手的触摸感觉。据悉,该传感器可放置于指尖部分,体积小巧且提供板载数据分析能力,最大的特点是支持检测皮肤形变,震动,温度。
而HaptX技术的核心在于微流体技术,其通过在亚毫米细的管道内注入液体,并通过改善液体来控制这些气囊,而HaptX手套中拥有数百个这样微小的气囊,从而通过气囊间的膨胀来模拟逼真的触感。而HaptX手套同样能够模拟传递物体的形状、质地和温度等。

该方案既能就可以实现人佩戴HaptX手套去远程控制机械手掌,而机械手掌的传感器数据还能回传给HaptX手套,形成回互动。
想一想,在执行爆破等任务时,这样的方案是不是能尽可能降低人类爆破员受伤的风险的。甚至还能在地震等复杂场景下执行远程医疗、远程协助等任务。

HaptX创始人兼CEO Jake Rubin表示:我们认为这套性的系统能够给更多领域和行业带来,远程操控未来很可能把人类的灵活性和机器人的力量、速度、稳定性融合在一起,这在中需要人类交互的任务有重大意义,可尽让人类尽可能降低负载,远离或不直接接触。

没想到的是,HaptX营销总监Andrew Mitrak表示:该方案还可以应用在在电子竞技中,例如VR游戏、VR社交等。它能够真实的模仿人类的动作,包括握手、拥抱,这些完全可以通过手去感受到对方的存在。
当然,该方案也并不完美,例如真实的人类会感受到疼痛,目前该方案还做不到。因此他们也在寻找如何通过机器人疼痛,并将疼痛数据化,然后回传给戴着VR手套的人类。

据青亭网了解,HpatX团队下一个目标就是加入360°立体视频拍摄系统和VR头显,以方便将远程视频画面实时呈现给操控者。随着5G的到来,这方面也会变得更轻松。

实话讲,我不敢想象未来的应用场景会是什么样,但知道原理后往往会让我细思极恐。甚至,你都不用出门了,你的机器人替身可以代替你做任何事情,《生活大爆炸》里谢尔顿的机器人貌似还可以做的更完美。